
Robotics product
Robot NS2 Glass
The 4 axes robot is the simplest and faster robot available. It can be used in several applications with faster speed in comparison with a 6 axes robot. The 4 axes robot must be installed on a supporting structure which can be manufactured locally upon our detail drawings.
The 4-axes robot can be used to feed:
- Automatic rotary presses
- IS monosection machines
- Loading of Shiller type machines
- Loading of semiautomatic machines
And:
Loading of presses and spinning machines, when the maximum difference between the highest mould and the shortest mould doesn’t exceed 200 mm
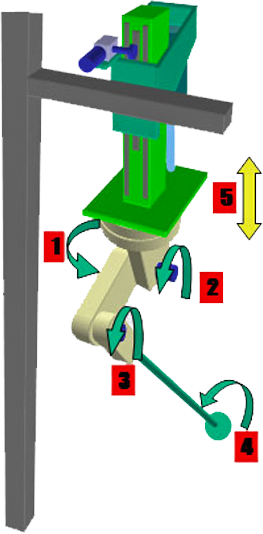
Anthropoid gatherer robot with 4 axis, three of which are controlled in position and 1 is controlled in motion, used for gathering the glass from the furnaces.
The machine is specifically conceived to operate in glass gathering operation and is installed overhung on a specific supporting steel structure. This configuration allows to have more space available on ground for the forming machines that can be positioned closer to the furnace with advantage to glass quality and production speed.
The mechanical parts of the robot are made of cast iron and aluminium. The ball holding rod is made in special steel cooled with water which is fed from a rotating distributor. All axes are motorized with Brushless motors with encoder for accurate positioning. Gear type reduction boxes with parallel axis are used to drive each axis of the robot.
USEFUL LINKS
Charactetistics
New C5G
Robot Controller
- Fast processing with dual core architecture
- Modular system for drives unit and i/o and fieldbus
- Free and ergonomic space for application functions integration
- Energy saving system
- Dimensions: 800x500x1100 mm
- Working temperature: 5 to 45°C (5 to 55°C with cooler)
- Humidity: 90% max, no condensation

High processing power
The C5G uses the latest generation of industrial PC APC820 with Core2 Duo technology CPU which can obtain high performance with low energetic consumption.
Energy saving
- Lowest consumption in stand-by, low consumption during operations
- Cooling system is proportional to control unit’s operations
- Energy network recover system with a high dynamic content program
Flexibility and reliability
The new generation of field bus based on Hilscher technology and integrated by B&R in their remote I/O X20 family, guarantees a flexible and reliable interface in every customer application. Modular interfaces are available, such as digital I/O, analog I/O as well as the position transducer encoder, resolver, etc.
Robotsafe
Safe robot controller models allow a safety-rated management of the robot motion (joint or cartesian mode) and speed, o offering advantages in terms of smaller layouts and absence of physical fences. Using sensors, we provide the safety of your automatic cell without a affecting your productivity.
Multi applications management
Possibility to manage many application.
New Teach Pendant TP5

Family feeling
The ease of use allows quick learning by the operator via a “natural evolution” in respect to previous versions. Full compatibility with existing applications that have been developed by customers for the C5G platform.
Case and cable
Intensive design and attention to detail to guarantee enhanced ergonomics. Enabling keys on the back reduces wrist fatigue and ensures easier use of the central keyboard area. It can be handled more easily and in multiple ways to reduce operator fatigue at work.
Hardware and software
architecture
Improved graphics for more intuitive use. Faster USB port.
Light weight and greater
maneuverability
The practical upper handle delivers increased movability and enables the TP to be hung even when far from the controller.
Display and keyboard
7” WIDE touch screen provides simplified and faster interaction. Optimized operations, even when using only the keyboard, for enhanced use in difficult production environments. Simplified keyboard designed to locate keys more easily during the programming phase thanks special tactile references on the membrane. Improved keyboard feedback when buttons are pressed.
Software NGIL
The robot is provided with the powerful software NGIL. This software allows the customer to work with every GLASS SERVICE robot with a total flexibility of production.
Most innovative features
“A 2” BUTTON
On the PTU there are the A2 and A1 buttons. Simply pressing A2 button, the robot will gather the glass on a deeper position, according to the pre-programmed instructions.
Pressing A1 button, the robot will gather the glass on an higher position, according to the pre-programmed instructions.
This is very useful when the glass level is not perfectly constant, both in continuous furnaces, in day-tanks and pot furnaces.
MULTI – PROGRAMMING SYSTEM
This is the most innovative part of the software:
- The operator can programme from 1 to 3 different trajectories of the ball, and can use them contemporary. The robot will gather the first drop, according to the requested parameters, and then execute the first trajectory to serve a first mould; then the robot gather the second drop and execute the second trajectory, and so on, up to 3 times, in a cycling sequence.
- Thanks to the multi-programming system, the robot can serve the glass to 1, 2 or 3 different moulds at the same time.
- The robot can produce from 1 to 3 different drops, with different weights or shapes (according to the dimension of the ball, of course) at the same time.
- It means that, on the same machine, press for example, it is possible to realise up to 3 different items in the same cycle of production.
- Moreover, the robot can work on the right and on the left contemporary, serving the glass to different machines (press and spinning machine, for example).
- "Linking": the 3 different programs can be linked or not. It means that you can work with 3 drops and trajectories and choose to modify them all together or separately.
Air Conditioner
The robot controller shall be installed in a closed room with air conditioning in order to keep the temperature within the working limits. In case this accommodation could not be possible an Air Conditioner integrated with the robot controller can be supplied.
The Air Conditioner is mounted on the controller front door and is able to keep the internal temperature of the cabinet at a set lower value.
Electric Box for Interconnection with
Forming Machine to be fed Downstream
The electric Junction box and the set cables allow the connection between the robot control board and all the peripheral units
(the automatic shearsand the forming machines). The remote push bottom panel is a special panel on which the main functions of the robot (start, stop, A1 and A2
buttons, emergency, etc.) are reproduced. It can be used by the operator nearby the machine for simple commands during operation.
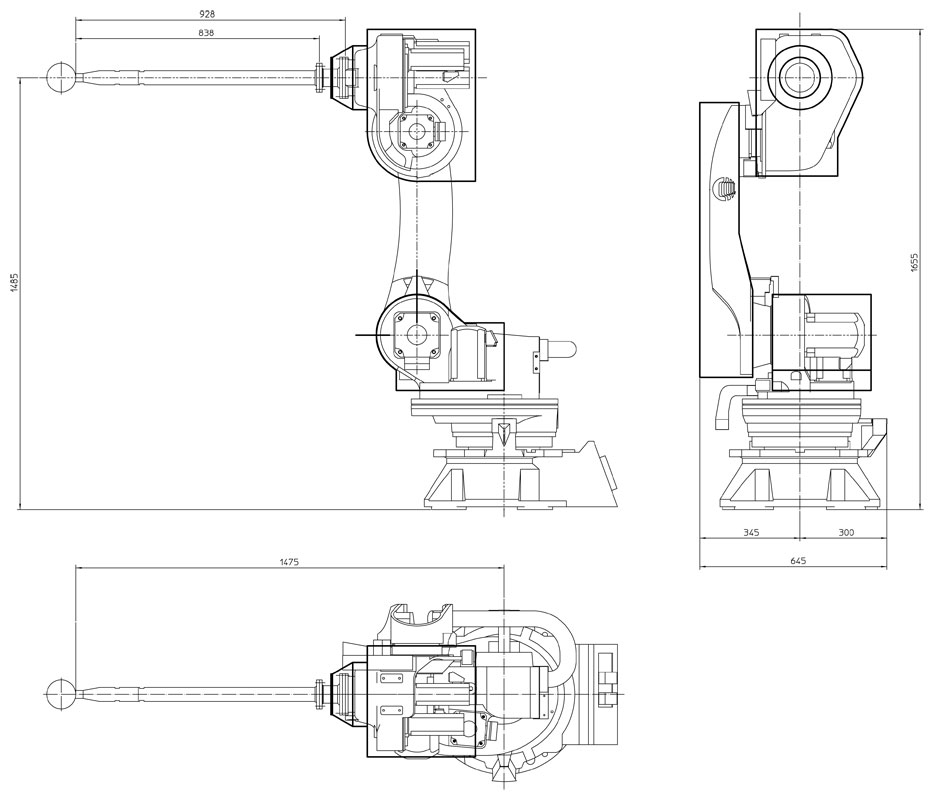
Robot
| Model | SMART NS2 GLASS |
|---|---|
|
Maximum workable weight |
12 kg |
|
Load less cycles |
15 |
|
Repeatability |
+/- 0,05 mm |
|
Number of axis |
4 |
|
Stroke of axis 1 (speed) |
+/- 180° (155°/s) |
|
Stroke of axis 3 (speed) |
+155° -60° (155°/s) |
|
Stroke of axis 4 (speed) |
+110° -170° (170 °/s) |
|
Stroke of axis 2 (speed) |
+/- 2700° (360 °/s) |
|
Weight |
240 kg |
|
Motor |
AC brushless |
|
Measuring system |
Encoder |
Control board
| Model | C5G |
|---|---|
|
Controller |
Dual core architecture |
|
Programming software |
GIL (Glass interface software) |
|
Voltage |
from 400 Vac -10% to 480 Vac +10% |
|
Frequency |
50 a 60 Hz (±2 Hz) |
|
Total installed power |
6 KVA |
|
Dimensions |
1110 x 800 x 510 mm |
|
Weight |
125 kg + 31 kg with air conditioner |
|
Environment temperature |
From +5°C to +55 °C (with air conditioner) From +5°C to +45°C (no air conditioner) |
|
Operator’s interface |
Teach pendant TP5 |
Robot
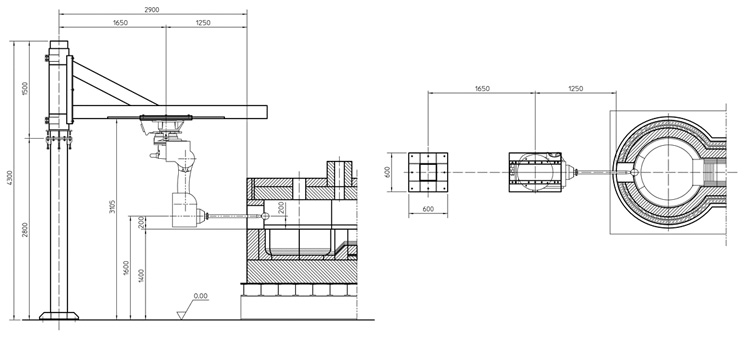
Installation
The overhung position is preferred because the free space under the robot for the glass forming machine installation. This installation also reduces the robot gathering ball stroke from the gathering hole and the mould and consequently increase the robot production speed.
Additional
Vertical Axis
With this simple device, the 4-axis robot increases its flexibility making easier the connection between the working ends (gathering bay) and the machines (i.e.: spinning machine, blowing machine, etc.).
This device is overhung on the holding structure of the robot and it consists of a vertical column that translates vertically on special rollers slides. The translation is transmitted by means of a pinion-rack system powered by a brushless electric motor coupled with a reduction gear. All the mechanical parts and the sliding system are protected against dust and dirt by means of suitable bellows.
A pneumatic piston is positioned vertically besides the column in order to balance the weight of the robot and of the vertical axis device during the vertical translation. Being the system overhung the main advantage of this solution is that there is not any additional encumbrance on ground.

Technical Characteristics
Vertical stroke:
mm 500
The vertical axis can increase the production quality and production speed for the high height variation of the blank mould or whwen the mould height is higher the than glass level.
The vertical axis is also recommended for borosilicate Pyrex production.
Accessories
This shear mechanism is conceived in order to be integrated and synchronised with others units or lines that gather and distribute the glass gob into the forming machines (spinning machines, press machines, press-blow machines, injection machines, and manual production).
The machine is made of a steel basement with a vertical column (X axis) on which the shears unit (slide, pistons and shears) is mounted. The unit is provided with two pneumatic pistons controlled by pneumatic electro-valves for the positioning movement of the shears and for shears blade cutting movement. The operator can manually adjust the following positions in order to allow the shears to be properly interfaced with others machines:
- Vertical translation (Z axis)
- Length position (X axis)
- Arm rotation on axis X, Y and Z
The supply includes the pneumatic circuit with lubricating system, electro-valves, filter and the electric connecting box. The first supply also includes the shear’s blades (linear type) made in special high resistance steel.
mm 1700x1450x2030
Specification of Fluids
Compressed Air: min 6 bar
Characteristics of compressed air: dried (*)
Consumption of compressed air at average speed: 25 lt/min
Consumption of compressed air at max speed: 73 lt/min
Gathering Balls
The steel ball are produced by glass service and ca be reuse several time till the steel thickness after blast cleaning is strong enough for production.
The steel ball are very light because empty inside. For the production the steel ball surface is coated by a refractories layer.
The refractory powder for the surface coating is supply from Glass Service with the operating instruction.
The standard diameter size available are from 20 to 200 mm with a step of 10 mm.
Diameters available 20-30-40-50-60-70-80-90-100-110-120-130-140-150-160-170-180-190-200 mm.
Robot Double Shield and
Supplementary Water Cooling
In case of robot installation in very strong and hot condition, for example in borosilicate Pyrex glasses, an extra water cooling
and thermal shield are available.
Double thermal shields in stainless steel
Supplementary water radiator cooling for each axis electrical motor
Supplementary electrical motor water cooling circuit